|
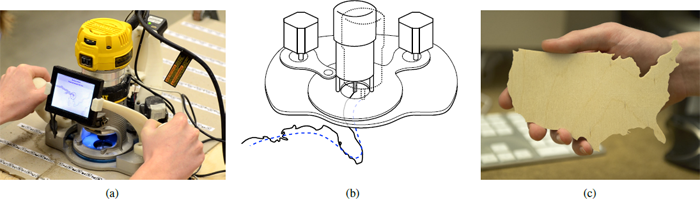
Overview: (a:) A position-correcting tool. The device consists of a frame and a tool (in this case a router) mounted within that frame. The frame is positioned manually by the user. A camera on the frame (top right in the figure) is used to determine the frame's location. The device can adjust the position of the tool within the frame to correct for error in the user's coarse positioning. (b): To follow a complex path, the user need only move the frame in a rough approximation of the path. In this example, the dotted blue line shows the path that the tool would take if its position were not adjusted; the black line is its actual path. (c): An example of a shape cut out of wood using this tool. People
Alec Rivers, MIT CSAIL Abstract Many kinds of digital fabrication are accomplished by precisely moving a tool along a digitally-specified path. This precise motion is typically accomplished fully automatically using a computer-controlled multi-axis stage. With that approach, one can only create objects smaller than the positioning stage, and large stages can be quite expensive. We propose a new approach to precise positioning of a tool that combines manual and automatic positioning: in our approach, the user coarsely positions a frame containing the tool in an approximation of the desired path, while the device tracks the frame's location and adjusts the position of the tool within the frame to correct the user's positioning error in real time. Because the automatic positioning need only cover the range of the human's positioning error, this frame can be small and inexpensive, and because the human has unlimited range, such a frame can be used to precisely position tools over an unlimited range. Acknowledgments The authors wish to thank the many people who contributed their time and advice, including Michael Martin, Vladimir Bychkovsky, Adam Saltzman, Aleksandr Kivenson, Peter Brooks, Daniel Reetz, Ron Wikin, Robert Wang, Lewis Girod, Wojciech Matusik, Andrew Adams, Justin Lan, Skylar Tibbits, David Wallace, and Alexander Slocum. The team would like to thank the MIT Edgerton Center Student Shop and the MIT Hobby Shop for their expertise and the use of their equipment and space during the fabrication and testing of our hardware. Paper
Consumer version / mailing list A consumer version of the position-correcting router is being developed, to be released by a forthcoming startup. Add your name to the mailing list to keep informed. Video
|